SISTEM OTOMATISASI PENGECEKAN KUALITAS HASIL AYAM PETELUR
Industri peternakan unggas, khususnya dalam produksi telur, menghadapi tantangan besar dalam menjaga efisiensi dan kualitas produk. Salah satu proses penting yang menentukan mutu telur adalah proses penyortiran, di mana telur yang layak konsumsi dipisahkan dari telur yang cacat atau busuk. Secara tradisional, proses ini dilakukan secara manual, yang tidak hanya memakan waktu dan tenaga, tetapi juga memiliki risiko kesalahan manusia yang tinggi. Oleh karena itu, dibutuhkan solusi teknologi yang dapat meningkatkan kecepatan dan akurasi dalam proses sortir telur. Dalam menjawab tantangan tersebut, proyek ini bertujuan merancang dan membangun sistem sortir telur otomatis berbasis mikrokontroler Raspberry Pi Pico.
Sistem ini menggunakan kombinasi berbagai sensor untuk mendeteksi kehadiran telur, mengevaluasi kualitas berdasarkan intensitas cahaya (candling), mengukur berat, serta memastikan posisi telur pada titik sortir. Data dari sensor kemudian dianalisis oleh Raspberry Pi Pico dan STM32 untuk menentukan arah sortir yang sesuai, mengarahkan telur ke tray yang tepat menggunakan servo motor. Sistem ini diharapkan dapat memberikan solusi efisien dan murah bagi peternak skala kecil hingga menengah. Dengan memanfaatkan komponen yang mudah diperoleh dan biaya pengembangan yang relatif rendah, sistem ini memungkinkan otomatisasi proses sortir tanpa ketergantungan pada peralatan industri yang mahal.
Selain meningkatkan produktivitas, sistem ini juga membantu menjaga mutu telur yang sampai ke konsumen, sekaligus mengurangi limbah akibat kesalahan sortir. Implementasi teknologi seperti ini mencerminkan potensi besar integrasi sistem embedded dalam sektor agrikultur. Dengan pendekatan yang modular dan adaptif, sistem sortir telur otomatis ini juga dapat dikembangkan lebih lanjut, seperti integrasi data ke platform monitoring berbasis IoT atau pengenalan bentuk dan ukuran untuk klasifikasi lebih kompleks.
Project ini bertujuan untuk:
-
Merancang dan mengembangkan sistem sortir telur otomatis berbasis mikrokontroler Raspberry Pi Pico dan STM32 guna meningkatkan efisiensi dan akurasi dalam proses pemilahan telur.
-
Mengurangi ketergantungan terhadap proses sortir manual, yang cenderung lambat dan rawan kesalahan, dengan menyediakan alternatif otomatis yang hemat biaya dan mudah diterapkan di peternakan skala kecil hingga menengah.
-
Meningkatkan mutu hasil produksi telur dengan memastikan hanya telur layak konsumsi yang sampai ke konsumen.
-
Mendorong penerapan teknologi embedded system dalam sektor pertanian dan peternakan, serta membuka peluang pengembangan lebih lanjut menuju sistem pemantauan berbasis IoT dan klasifikasi telur yang lebih kompleks.

- Mikrokontroler: STM32F103C8T6 (ARM Cortex-M3)
- Kecepatan Clock: 72 MHz
- Memori Flash: 64 KB
- SRAM: 20 KB
- Catu Daya: 5V (via Micro-USB atau pin)
- Output Tegangan: 3.3V (on-board regulator)
- GPIO: Sekitar 37 pin
- Fitur Komunikasi: USB, SPI, I2C, UART, CAN
- Konverter: ADC 12-bit
- Kristal: 8 MHz (utama) & 32.768 KHz (RTC)
- Debug/Program: SWD
- Indikator: 1x LED
- Tombol: Reset
2. Raspberry Pi Pico

Berikut adalah spesifikasi :
- Mikrokontroler: RP2350 (chip kustom dari Raspberry Pi)
- Core: Dual-core ARM Cortex-M33
- Clock Speed: Hingga 300 MHz
- Memori Flash: 16MB
- RAM (SRAM): 512KB
- GPIO: Sekitar 26 pin multifungsi (termasuk ADC)
- Antarmuka Komunikasi: USB 2.0 (Device), SPI, I2C, UART
- Fitur Spesial: Programmable I/O (PIO)
- Catu Daya: 5V via USB atau 2-5V via pin VSYS
- Debug: SWD (Serial Wire Debug)
3. Sensor Infrared

Spesifikasi :
- Tegangan Operasional: 3.3V hingga 5V DC
- Arus Operasional: 10mA hingga 20mA
- Jarak Deteksi: 1mm hingga 25mm
- Panjang Gelombang: 950nm (inframerah)
- Sudut Deteksi: ±15°
- Output: Digital (tinggi/rendah)
- Konektor: 3 pin (VCC, GND, OUT)
- Dimensi: 10.2mm x 5.8mm x 7mm

Spesifikasi Modul Sensor LDR:
- Sensor Utama: LDR (Light Dependent Resistor)
- Output: Digital (ON/OFF) via pin DO. Beberapa modul juga memiliki Analog Output (AO).
- Fitur: Komparator on-board dengan potensiometer untuk mengatur ambang batas.
- Indikator: LED Power dan LED Status Output.
- Tegangan Operasi: 3.3V - 5V DC
- Pin Out: 3 pin (VCC, GND, DO) atau 4 pin (VCC, GND, DO, AO).
5. Load Cell sensor

- Tegangan Operasi: 5V DC (umum untuk load cell kecil)
- Rentang Kapasitas: Bervariasi (misalnya, 1kg, 5kg, 10kg, hingga beberapa ton)
- Tegangan Output: 1 mV/V hingga 3 mV/V (bergantung pada beban penuh)
- Non-linearitas: ±0.03% hingga ±0.1% dari kapasitas penuh
- Histeresis: ±0.02% hingga ±0.05% dari kapasitas penuh
- Suhu Operasi: -10°C hingga 40°C (umum untuk load cell kecil)

Spesifikasi :
- Tegangan Operasional: 4.8V hingga 6.0V DC (tergantung model)
- Torsi: Berbeda untuk setiap model, biasanya diukur dalam kg-cm atau oz-in
- Sudut Rotasi: Umumnya 0 hingga 180 derajat, beberapa model dapat berputar 360 derajat atau lebih
- Kecepatan: Waktu yang diperlukan untuk bergerak dari satu posisi ke posisi lain (misalnya, 0.1 detik/60 derajat)
- Kontrol: Sinyal PWM (Pulse Width Modulation)

Berikut adalah spesifikasi umumnya:
- Tipe Motor: Motor DC dengan Gearbox
- Warna Casing: Kuning (khas untuk tipe motor ini)
- Tegangan Operasi: Umumnya 3V - 6V DC (seringkali optimal di 3V atau 5V)
- Arus Tanpa Beban: Sekitar 70mA - 100mA (pada 3V-5V)
- Arus Beban: Bisa mencapai 250mA - 350mA atau lebih saat terbebani atau start-up (pada 3V-5V)
- Rasio Gearbox: Beragam, tetapi yang paling umum adalah 1:48 (misalnya, jika motor DC berputar 48 kali, poros output gearbox berputar 1 kali)
- Kecepatan Rotasi Output (RPM):
- Pada 3V: Sekitar 90-120 RPM
- Pada 6V: Sekitar 180-240 RPM
- Fitur:
- Desain kompak dan ringan.
- Poros output tunggal dengan bentuk D-shaft atau bulat untuk koneksi roda atau coupler.
- Dilengkapi dengan gearbox untuk mengurangi kecepatan dan meningkatkan torsi.
- Penggunaan Umum: Roda robot, mekanisme penggerak sederhana, proyek DIY, mainan, dll.
8. LCD 16x2 I2C

Berikut adalah spesifikasi umumnya:
- Tipe Display: LCD (Liquid Crystal Display)
- Format Tampilan: 16 karakter x 2 baris
- Warna Backlight: Biru (paling umum, meskipun ada varian lain seperti hijau/kuning)
- Warna Karakter: Putih (kontras dengan backlight biru)
- Antarmuka Komunikasi: I2C (Inter-Integrated Circuit)
- Menggunakan PCF8574 I/O Expander Chip on-board.
- Hanya membutuhkan 2 pin data (SDA, SCL) plus VCC dan GND dari mikrokontroler, sangat menghemat pin GPIO.
- Tegangan Operasi: 5V (untuk modul I2C dan LCD itu sendiri)
- Potensiometer On-board: Untuk mengatur kontras tampilan.
- Pin Out: 4 pin (VCC, GND, SDA, SCL)
- Ukuran Modul: Standar 16x2 LCD
- Kompatibilitas: Sangat umum digunakan dengan Arduino, Raspberry Pi, ESP32, ESP8266, dan mikrokontroler lainnya.
9. LED Indikator

Berikut adalah spesifikasi umumnya:
- Tipe: LED Through-Hole
- Warna Emisi: Merah
- Ukuran: Diameter 5mm (bentuk bulat)
- Tegangan Maju (Forward Voltage, Vf): Umumnya sekitar 1.8V - 2.2V (nilai tipikal 2.0V)
- Arus Maju (Forward Current, If): Umumnya 20mA (Maksimum absolut biasanya 30mA)
- Intensitas Cahaya (Luminous Intensity): Bervariasi, dari beberapa mcd (millicandela) hingga puluhan atau bahkan ratusan mcd, tergantung pada kualitas dan jenis LED.
- Panjang Gelombang (Wavelength): Umumnya sekitar 620nm - 630nm (untuk merah).
- Sudut Pandang (Viewing Angle): Bervariasi, tergantung pada bentuk lensa (bening atau difusi), tetapi umumnya sekitar 20-30 derajat untuk lensa bening dan lebih lebar untuk lensa difusi.
- Kaki (Lead): Dua kaki (anoda dan katoda)
- Anoda (+): Kaki yang lebih panjang.
- Katoda (-): Kaki yang lebih pendek (atau sisi datar pada pinggiran lensa).
- Kebutuhan: Membutuhkan resistor pembatas arus (current-limiting resistor) saat dihubungkan ke sumber tegangan yang lebih tinggi dari Vf-nya untuk mencegah kerusakan.
10. LED 5W


Spesifikasi Kabel Jumper DuPont Tipe Pita (Ribbon Jumper Wires):
- Tipe Konektor: Male to Female (yang paling umum), atau Male to Male, Female to Female.
- Ukuran Pin: Standar 2.54mm (0.1 inci).
- Jumlah Kabel: Umumnya 10, 20, atau 40 kabel dalam bentuk pita (dapat dipisah).
- Warna: Berwarna-warni (pelangi) untuk identifikasi mudah.
- Panjang: Bervariasi (umum 10cm, 20cm, 30cm, dll.).
- Ukuran Kawat: Umumnya 22 AWG - 28 AWG.
- Penggunaan: Prototipe elektronik, breadboard, koneksi antar modul dan mikrokontroler

Spesifikasi :
- Trigger Voltage (Voltage across coil) : 5V DC
- Trigger Current (Nominal current) : 70mA
- Maximum AC load current: 10A @ 250/125V AC
- Maximum DC load current: 10A @ 30/28V DC
- Compact 5-pin configuration with plastic moulding
- Operating time: 10msec Release time: 5msec
- Maximum switching: 300 operating/minute (mechanically)
13. Motor Driver (L298N)

Spesifikasi Modul Driver Motor L298N:
- Chip: L298N (Dual H-Bridge)
- Fungsi: Mengontrol 2 Motor DC atau 1 Motor Stepper.
- Tegangan Motor: 5V - 35V DC
- Arus Output: Hingga 1.5A per kanal (kontinu), 2A (puncak).
- Fitur: Dilengkapi heatsink, dioda pelindung, regulator 5V on-board.
- Input Logika: 5V.
Pengertian STM32:
STM32 adalah keluarga besar mikrokontroler 32-bit berbasis inti prosesor ARM Cortex-M, yang diproduksi oleh STMicroelectronics. Istilah "STM32" sendiri mengacu pada seluruh rangkaian produk mikrokontroler ini, yang mencakup berbagai seri (F0, F1, F3, F4, G0, G4, L0, L4, H7, dll.) dengan fitur, kecepatan, dan konsumsi daya yang bervariasi untuk memenuhi kebutuhan aplikasi yang beragam.
Inti Prosesor ARM Cortex-M:
Inti (core) dari mikrokontroler STM32 adalah arsitektur ARM Cortex-M. Ini adalah arsitektur prosesor yang dirancang khusus oleh ARM Holdings untuk mikrokontroler, dengan fokus pada efisiensi daya, kinerja tinggi, dan biaya rendah.
- Cortex-M0, M0+, M3, M4, M7, M23, M33: STM32 menggunakan berbagai inti Cortex-M ini.
- Cortex-M3: Inti yang populer untuk keseimbangan kinerja dan biaya (misalnya, pada STM32F103 "Blue Pill").
- Cortex-M4: Menambahkan unit floating-point (FPU) dan instruksi DSP (Digital Signal Processing) untuk aplikasi yang lebih kompleks (misalnya, pada seri F4).
- Cortex-M7: Inti berkinerja paling tinggi dalam keluarga Cortex-M, untuk aplikasi yang sangat menuntut.
Arsitektur Mikrokontroler:
Seperti mikrokontroler pada umumnya, STM32 mengintegrasikan semua komponen penting dalam satu chip:
- Inti Prosesor (CPU): Melakukan eksekusi instruksi.
- Memori:
- Flash Memory: Untuk menyimpan program (firmware). Kapasitas bervariasi dari puluhan KB hingga MB.
- SRAM (Static RAM): Untuk menyimpan data variabel dan tumpukan (stack) saat program berjalan. Kapasitas bervariasi dari beberapa KB hingga ratusan KB.
- Periferal (Peripherals): Berbagai modul fungsional yang memungkinkan mikrokontroler berinteraksi dengan dunia luar. Ini adalah kekuatan utama STM32.
Fitur dan Periferal Umum STM32:
STM32 terkenal dengan kekayaan periferalnya, yang bervariasi antar seri dan model, tetapi umumnya meliputi:
- GPIO (General Purpose Input/Output): Pin digital yang dapat dikonfigurasi sebagai input atau output, untuk membaca status tombol, mengontrol LED, dll.
- ADC (Analog-to-Digital Converter): Mengubah sinyal analog (misalnya dari sensor) menjadi digital. Banyak STM32 memiliki ADC beresolusi tinggi (12-bit atau lebih) dan banyak kanal.
- DAC (Digital-to-Analog Converter): Mengubah sinyal digital menjadi analog.
- Timer/Counter: Untuk pengukuran waktu, menghasilkan PWM (Pulse Width Modulation) untuk kontrol motor, atau menghasilkan delay. STM32 memiliki banyak timer yang canggih (basic, general-purpose, advanced-control).
- Antarmuka Komunikasi:
- UART/USART: Serial Asynchronous Receiver-Transmitter (untuk komunikasi serial dengan PC, modul Bluetooth, dll.).
- SPI (Serial Peripheral Interface): Komunikasi serial sinkron kecepatan tinggi (untuk sensor, LCD, SD card).
- I2C (Inter-Integrated Circuit): Komunikasi serial dua arah (untuk sensor, EEPROM, LCD I2C).
- USB: Mendukung mode Device, Host, atau OTG (On-The-Go).
- CAN (Controller Area Network): Umum di aplikasi otomotif dan industri.
- Ethernet: Pada seri yang lebih tinggi, untuk konektivitas jaringan.
- SDIO (Secure Digital Input/Output): Untuk antarmuka kartu SD.
- RTC (Real-Time Clock): Menjaga waktu dan tanggal bahkan saat daya mati (dengan baterai cadangan).
- DMA (Direct Memory Access): Memungkinkan periferal untuk mentransfer data langsung ke/dari memori tanpa intervensi CPU, meningkatkan efisiensi.
- Watchdog Timer: Sistem pengawas untuk mereset mikrokontroler jika program macet.
- Unit Keamanan: Pada seri tertentu, ada fitur keamanan seperti cryptography atau secure boot.
1. Pengertian Raspberry Pi Pico:
Raspberry Pi Pico adalah sebuah microcontroller development board (papan pengembangan mikrokontroler) berbiaya rendah dan berkinerja tinggi yang dikembangkan oleh Raspberry Pi Foundation. Berbeda dengan Raspberry Pi "komputer" yang menjalankan sistem operasi seperti Linux, Pico dirancang untuk aplikasi bare-metal atau real-time yang lebih sederhana, mirip dengan Arduino, namun dengan kekuatan komputasi yang lebih besar.
2. Chip Utama: RP2040 (Mikrokontroler Kustom Raspberry Pi)
Jantung dari Raspberry Pi Pico adalah chip mikrokontroler RP2040, yang merupakan chip kustom pertama yang dirancang oleh Raspberry Pi sendiri.
- Arsitektur CPU: Dual-core ARM Cortex-M0+
- Memiliki dua inti prosesor Cortex-M0+ yang dapat berjalan secara independen atau bersamaan, memungkinkan pemrosesan paralel untuk tugas-tugas yang lebih kompleks.
- Kecepatan Clock: Fleksibel, hingga 133 MHz (dapat di-overclock hingga 200+ MHz).
- Memori Internal:
- SRAM: 264KB on-chip SRAM. Ini adalah jumlah SRAM yang cukup besar untuk mikrokontroler di kelasnya.
- Flash Memory: Tidak ada flash memori on-chip pada RP2040 itu sendiri. Namun, papan Pico memiliki chip QSPI Flash eksternal (biasanya 2MB, tetapi bisa lebih besar pada varian lain) untuk menyimpan program.
- DMA (Direct Memory Access): Mendukung DMA, memungkinkan periferal untuk mengakses memori tanpa intervensi CPU, membebaskan CPU untuk tugas lain.
3. Fitur Utama dan Periferal pada Raspberry Pi Pico:
Pico dirancang untuk fleksibilitas dan kemudahan penggunaan, dengan berbagai periferal yang kuat:
- GPIO (General Purpose Input/Output): Sekitar 26 pin GPIO multifungsi.
- Sebagian besar pin ini dapat digunakan untuk berbagai tujuan: digital I/O, ADC, PWM, UART, SPI, I2C, dll.
- ADC (Analog-to-Digital Converter): 3 kanal 12-bit ADC internal.
- PWM (Pulse Width Modulation): 8 slice PWM, masing-masing dengan 2 output (total 16 PWM output). Sangat fleksibel untuk kontrol motor, LED, dll.
- Antarmuka Komunikasi:
- UART: 2 UART.
- SPI: 2 SPI.
- I2C: 2 I2C.
- USB: USB 1.1 Host dan Device. Dapat digunakan sebagai Virtual COM Port, HID (Human Interface Device), dll.
- Timer: Timer dengan 4 alarm dan 1 penghitung real-time (RTC).
- PIO (Programmable I/O): Ini adalah fitur yang sangat unik dan kuat dari RP2040.
- Terdiri dari dua blok PIO, masing-masing dengan 4 state machine independen.
- PIO memungkinkan pengguna untuk mengimplementasikan periferal kustom yang presisi waktu dan berkecepatan tinggi dalam perangkat keras, seperti video output (VGA), antarmuka kartu SD, antarmuka WS2812B (NeoPixel) yang sangat akurat, dan banyak lagi, tanpa membebani inti CPU.
- Sensor Suhu On-board: RP2040 memiliki sensor suhu internal.
- Kristal Osilator: 13 MHz kristal on-board.
- Port USB: Micro-USB (pada Pico asli) atau USB-C (pada Pico W/H/H+). Digunakan untuk pemrograman, debugging, dan catu daya.
- Tombol BootSEL: Tombol yang memungkinkan Pico masuk ke mode USB mass storage device untuk drag-and-drop file UF2 (Unified Flash Format) untuk pemrograman, sangat memudahkan.
- Pin Debug: SWD (Serial Wire Debug) pin untuk debugging tingkat lanjut.
4. Lingkungan Pengembangan (Development Environment):
Raspberry Pi Pico sangat fleksibel dalam hal lingkungan pengembangan:
- MicroPython: Ini adalah opsi yang paling populer dan ramah pemula. Anda dapat langsung mengunggah firmware MicroPython ke Pico, lalu menulis dan menjalankan kode Python secara langsung di papan menggunakan editor serial (seperti Thonny).
- C/C++ SDK (Software Development Kit): Untuk pengembang yang membutuhkan kinerja dan kontrol lebih tinggi, Raspberry Pi Foundation menyediakan SDK C/C++ yang komprehensif. Ini memungkinkan pemrograman bare-metal atau penggunaan RTOS (Real-Time Operating System).
- CircuitPython: Versi lain dari Python untuk mikrokontroler dari Adafruit, yang berfokus pada kemudahan penggunaan dan akses langsung ke hardware.
- Arduino IDE (dengan board package): Ada dukungan komunitas untuk menggunakan Arduino IDE dengan Raspberry Pi Pico, memungkinkan penggunaan banyak library Arduino yang sudah ada.
5. Kelebihan Raspberry Pi Pico:
- Harga Sangat Terjangkau: Salah satu mikrokontroler berkinerja tinggi termurah di pasaran.
- Performa Kuat: Dual-core ARM Cortex-M0+ pada 133 MHz (atau lebih) memberikan daya komputasi yang signifikan.
- Memori Besar: 264KB SRAM dan 2MB+ Flash memberikan banyak ruang untuk program dan data.
- Fitur PIO Unik: Memungkinkan implementasi periferal kustom yang presisi waktu.
- Fleksibilitas Pemrograman: Dukungan resmi untuk MicroPython dan C/C++ SDK, serta komunitas Arduino/CircuitPython.
- Kemudahan Pemrograman (UF2): Fitur drag-and-drop UF2 membuat pemrograman sangat mudah bagi pemula.
- Dokumentasi yang Luar Biasa: Raspberry Pi Foundation dikenal dengan dokumentasinya yang sangat lengkap dan mudah dipahami.
- Konsumsi Daya Rendah: Dirancang untuk aplikasi dengan konsumsi daya yang efisien.
6. Kekurangan Raspberry Pi Pico:
- Tidak Ada Wi-Fi/Bluetooth (Pico Asli): Model Pico awal tidak memiliki konektivitas nirkabel built-in (untuk itu, Anda perlu Pico W).
- Tidak Ada Ethernet/Video Out (seperti Raspberry Pi besar): Ini bukan komputer mini, jadi tidak ada fitur-fitur tersebut.
- Kurva Pembelajaran (untuk C/C++): Meskipun MicroPython mudah, menggunakan C/C++ SDK memerlukan pemahaman yang lebih dalam tentang mikrokontroler.
Infra red (IR) detektor atau sensor infra merah adalah komponen elektronika yang dapat mengidentifikasi cahaya infra merah (infra red, IR). Sensor infrared terdiri dari Led infra red sebagai pemancar(transmitter) dan pada bagian penerima(receiver) terdapat photodioda,phototransistor. Sensor infra merah atau detektor infra merah saat ini ada yang dibuat khusus dalam satu modul dan dinamakan sebagai IR Detector Photomodules. IR Detector Photomodules merupakan sebuah chip detektor inframerah digital yang di dalamnya terdapat fotodiode dan penguat.
Konfigurasi pin infra red (IR) receiver atau penerima infra merah tipe TSOP adalah output (Out), Vs (VCC +5 volt DC), dan Ground (GND). Sensor penerima inframerah TSOP ( TEMIC Semiconductors Optoelectronics Photomodules ) memiliki fitur-fitur utama yaitu fotodiode dan penguat dalam satu chip, keluaran aktif rendah, konsumsi daya rendah, dan mendukung logika TTL dan CMOS. Detektor infra merah atau sensor inframerah jenis TSOP (TEMIC Semiconductors Optoelectronics Photomodules) adalah penerima inframerah yang telah dilengkapi filter frekuensi 30-56 kHz, sehingga penerima langsung mengubah frekuensi tersebut menjadi logika 0 dan 1. Jika detektor inframerah (TSOP) menerima frekuensi carrier tersebut, maka pin keluarannya akan berlogika 0. Sebaliknya, jika tidak menerima frekuensi carrier tersebut, maka keluaran detektor inframerah (TSOP) akan berlogika 1.
Spesifikasi Sensor Reflektif Infrared
1. Tegangan Operasional: 3.3V hingga 5V DC
2. Arus Operasional: 10mA hingga 20mA
3. Jarak Deteksi: 1mm hingga 25mm
4. Panjang Gelombang: 950nm (inframerah)
5. Sudut Deteksi: ±15°
6. Output: Digital (tinggi/rendah)
7. Konektor: 3 pin (VCC, GND, OUT)
8. Dimensi: 10.2mm x 5.8mm x 7mm
Prinsip Kerja Sensor Infrared

Sistem sensor infra merah pada dasarnya menggunakan infra merah sebagai media untuk komunikasi data antara receiver dan transmitter. Ketika IR LED mencarkan radiasi cahaya,radiasi tersebut akan mencapai objek dan beberapa radiasi cahaya akan dipantukan kembali ke Penerima photodiode, Berdasarkan intensitas yang diterima oleh photodiode maka output dari sensor dapat ditentukan.
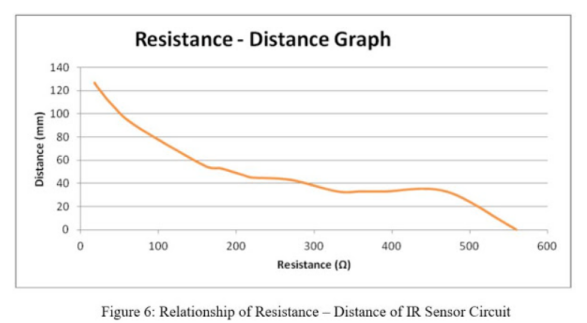
Grafik diatas menunjukkan hubungan anrara resistansi dan jarak untuk sensitivitas antara transmitter dan reciever. Resistor yang digunakan pada sensor mempengaruhi intensitas cahaya inframerah yang keluar dari pemancar. semakin tinggi resistansi yang digunakan, semakin pendek jarak IR reciever yang mampu mendeteksi sinar IR yang dipancarkan IR trasmitter karena intensitas cahaya yang lebih rendah dari IR transmitter.
Komponen Utama Sensor Infrared
1. LED IR (Light Emitting Diode): Memancarkan sinar inframerah.
2. Fotodioda/Fototransistor: Mendeteksi sinar inframerah yang dipantulkan atau terputus.
3. Rangkaian Pemroses Sinyal: Mengubah sinyal dari fotodioda menjadi sinyal yang dapat dibaca oleh mikrokontroler.
Sensor LDR (Light Dependent Resistor) adalah komponen yang resistansinya berubah tergantung pada seberapa banyak cahaya yang mengenainya. Dalam gelap, LDR memiliki resistansi yang sangat tinggi, sedangkan saat terang, resistansinya menurun drastis. Prinsip ini berdasarkan pada bahan semikonduktor di dalamnya yang melepaskan lebih banyak elektron saat terkena cahaya, sehingga listrik lebih mudah mengalir. LDR sering digunakan sebagai bagian dari rangkaian pembagi tegangan bersama resistor tetap, sehingga perubahan cahaya dapat diterjemahkan menjadi perubahan tegangan yang kemudian dibaca oleh mikrokontroler menggunakan ADC (Analog-to-Digital Converter).
Cara Kerja Detail LDR: LDR terbuat dari bahan semikonduktor (paling umum Kadmium Sulfida - CdS) yang memiliki sifat fotokonduktivitas. Ini berarti kemampuan bahan tersebut untuk menghantarkan listrik meningkat ketika terkena cahaya. Secara mikroskopis:
- Dalam Gelap: Elektron-elektron dalam bahan semikonduktor terikat pada atomnya. Jumlah elektron bebas yang tersedia untuk menghantarkan arus sangat sedikit, sehingga resistansinya sangat tinggi (isolator atau semi-isolator).
- Saat Terkena Cahaya: Foton (partikel cahaya) yang menabrak bahan semikonduktor mentransfer energinya ke elektron-elektron yang terikat. Energi ini cukup untuk membebaskan elektron dari ikatannya, menciptakan pasangan elektron-hole (lubang). Semakin banyak foton (cahaya yang lebih terang), semakin banyak elektron dan hole yang tercipta.
- Peningkatan Konduktivitas: Adanya elektron dan hole bebas ini meningkatkan jumlah pembawa muatan dalam material. Akibatnya, material menjadi lebih konduktif, dan nilai resistansinya menurun drastis.
Secara fisik, LDR biasanya memiliki bentuk cakram kecil atau zig-zag. Bagian peka cahayanya berupa lapisan tipis bahan semikonduktor yang diapit oleh dua elektroda. Desain zig-zag bertujuan untuk memperpanjang jalur konduktif bahan semikonduktor dalam area yang kecil, sehingga memaksimalkan area permukaan yang terpapar cahaya dan meningkatkan sensitivitas.

Grafik Kiri (Resistansi vs. Tingkat Cahaya): Grafik ini menunjukkan secara langsung bagaimana resistansi LDR bereaksi terhadap cahaya. Sumbu horizontal menunjukkan tingkat cahaya (dalam lux), dan sumbu vertikal menunjukkan resistansi LDR (dalam Ohm). Anda bisa melihat bahwa kurvanya melengkung ke bawah. Ini berarti saat cahaya mulai sedikit meningkat dari gelap, resistansi LDR turun sangat cepat. Namun, setelah mencapai tingkat cahaya tertentu, penurunan resistansi menjadi lebih landai meskipun cahaya terus bertambah. Ini menggambarkan hubungan non-linier antara cahaya dan resistansi LDR, di mana perubahan resistansi paling signifikan terjadi pada kondisi cahaya redup.
Grafik Kanan (Logaritma Resistansi vs. Logaritma Tingkat Cahaya): Pada grafik ini, baik sumbu horizontal (tingkat cahaya) maupun sumbu vertikal (resistansi) diubah ke dalam skala logaritma. Hasilnya adalah sebuah garis lurus yang menurun. Ini sangat penting karena menunjukkan bahwa meskipun hubungan asli (grafik kiri) itu non-linier, ketika Anda melihatnya dalam skala logaritmik, hubungan tersebut menjadi linier. Ini menyiratkan bahwa resistansi LDR berhubungan dengan tingkat cahaya melalui suatu persamaan pangkat. Keadaan ini memudahkan para insinyur dan pemrogram untuk mengkalibrasi dan bekerja dengan LDR secara matematis, karena garis lurus lebih mudah dimodelkan dan diprediksi dalam perhitungan.
Sensor load cell merupakan sensor yang dirancang untuk mendeteksi tekanan atau berat sebuah beban, sensor load cell umumnya digunakan sebagai komponen utama pada sistem timbangan digital dan dapat diaplikasikan pada jembatan timbangan yang berfungsi untuk menimbang berat dari truk pengangkut bahan baku, pengukuran yang dilakukan oleh Load Cell menggunakan prinsip tekanan.
Prinsip kerja load cell ketika mendapat tekanan beban.Ketika bagian lain yang lebih elastic mendapat tekanan, maka pada sisi lain akan mengalami perubahan regangan yang sesuai dengan yang dihasilkan oleh strain gauge, hal ini terjadi karena ada gaya yang seakan melawan pada sisi lainnya. Perubahan nilai resistansi yang diakibatkan oleh perubahan gaya diubah menjadi nilai tegangan oleh rangkaian IC HX711. Dan berat dari objek yang diukur dapat diketahui dengan mengukur besarnya nilai tegangan yang timbul.
Beberapa karakteristik yang terdapat pada load cell sensor antara lain adalah:
- Tegangan Operasi: 5V DC (umum untuk load cell kecil)
- Rentang Kapasitas: Bervariasi (misalnya, 1kg, 5kg, 10kg, hingga beberapa ton)
- Tegangan Output: 1 mV/V hingga 3 mV/V (bergantung pada beban penuh)
- Non-linearitas: ±0.03% hingga ±0.1% dari kapasitas penuh
- Histeresis: ±0.02% hingga ±0.05% dari kapasitas penuh
- Suhu Operasi: -10°C hingga 40°C (umum untuk load cell kecil)
Macam-macam loadcell
1. Loadcell Single Point Load cell bench scale. Loadcell ini dipasang pada bagian tengah platform timbangan.
2. Loadcell Shear Beam Load cell ini dipakai untuk floor scale.
3. Loadcell Compress Cara penggunaan Load cell ini adalah dengan menekan bagian atasnya. Biasanya load cell jenis ini di pakai untuk timbangan truck.
4. Loadcell Model S 3 Dinamakan Loadcell S karena bentuknya menyerupai huruf "S". cara kerja dari Load cell ini tidak di tekan melainkan ditarik sisi atas dan bawahnya. Sisi atas dikaitkan dengan gantungan sedangkan bagian bawahnya dikaitkan dengan barang yang akan ditimbang.
5. Loadcell Double Ended Load cell ini bekerja dengan menekan sisi tengahnya. Loadcell ini dipakai untuk timbangan truck.

Grafik Respon Sensor Load Cell
Motor servo adalah aktuator yang digunakan untuk mengontrol posisi sudut atau linear dengan presisi tinggi. Motor servo terdiri dari motor DC, sistem kontrol, dan potensiometer untuk umpan balik posisi. Banyak digunakan dalam aplikasi yang memerlukan kontrol posisi yang akurat, seperti robotika.
Spesifikasi Teknis Motor Servo
1. Tegangan Operasional: 4.8V hingga 6.0V DC (tergantung model)
2. Torsi: Berbeda untuk setiap model, biasanya diukur dalam kg-cm atau oz-in
3. Sudut Rotasi: Umumnya 0 hingga 180 derajat, beberapa model dapat berputar 360 derajat atau lebih
4. Kecepatan: Waktu yang diperlukan untuk bergerak dari satu posisi ke posisi lain (misalnya, 0.1 detik/60 derajat)
5. Kontrol: Sinyal PWM (Pulse Width Modulation)
Prinsip kerja motor servo yaitu motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.

Pulse Width Modulation
Motor DC gearbox kuning adalah unit terintegrasi yang terdiri dari dua komponen utama:
- Motor DC (Listrik): Ini adalah bagian yang mengubah energi listrik menjadi energi gerak rotasi. Motor DC bekerja berdasarkan prinsip elektromagnetik: ketika arus listrik dialirkan melalui kumparan (armature) yang berada dalam medan magnet permanen, timbullah gaya yang menyebabkan kumparan berputar.
- Gearbox (Mekanik): Ini adalah serangkaian roda gigi (gear) yang dirancang untuk:
- Mengurangi Kecepatan Rotasi (RPM): Putaran cepat dari motor DC diubah menjadi putaran yang jauh lebih lambat pada poros output.
- Meningkatkan Torsi (Torque): Dengan berkurangnya kecepatan, torsi (gaya putar) yang dihasilkan pada poros output meningkat secara signifikan. Ini penting agar motor dapat menggerakkan beban atau roda.
Fungsi dan Prinsip Kerja:
Fungsi utama motor DC gearbox kuning adalah menyediakan gerakan rotasi dengan torsi yang cukup untuk menggerakkan roda robot, baling-baling, atau mekanisme lainnya, pada kecepatan yang dapat dikelola.
- Motor DC: Menerima tegangan DC (biasanya 3V-6V). Polaritas tegangan menentukan arah putaran motor (jika + ke satu terminal dan - ke terminal lain, motor berputar searah jarum jam; jika polaritas dibalik, motor berputar berlawanan arah jarum jam).
- Gearbox: Putaran cepat dari poros motor DC masuk ke gearbox. Di dalamnya, serangkaian roda gigi dengan rasio yang berbeda akan "memperlambat" putaran dan pada saat yang sama "memperkuat" torsi. Misalnya, rasio gearbox 1:48 berarti poros motor harus berputar 48 kali agar poros output gearbox berputar 1 kali. Ini menghasilkan torsi 48 kali lipat (secara ideal) dari torsi motor DC tanpa gearbox, namun dengan kecepatan yang 48 kali lebih lambat.
Karakteristik dan Spesifikasi Khas:
- Tegangan Operasi: Umumnya 3V hingga 6V DC. Idealnya sering digunakan pada 3V atau 5V.
- Rasio Gearbox: Yang paling umum adalah 1:48. Ada juga varian lain seperti 1:120 atau 1:240 untuk torsi yang lebih tinggi dan kecepatan yang lebih rendah.
- Kecepatan Output (RPM):
- Pada 3V: Sekitar 90-120 RPM (Rotations Per Minute)
- Pada 6V: Sekitar 180-240 RPM
- Nilai ini adalah kecepatan tanpa beban. Kecepatan akan menurun saat motor dibebani.
- Arus Listrik:
- Arus tanpa beban: Biasanya antara 70mA - 100mA (pada 3V-5V).
- Arus beban/stalling (saat motor macet atau terbebani penuh): Bisa mencapai 250mA - 350mA atau lebih. Penting untuk diperhatikan karena mikrokontroler tidak dapat menyediakan arus sebesar ini secara langsung.
- Torsi: Meskipun tidak selalu tertera dalam N.cm atau kg.cm, motor ini memiliki torsi yang cukup untuk menggerakkan robot beroda kecil (misalnya robot line follower).
- Poros Output: Umumnya berbentuk "D-shaft" atau poros bulat dengan bidang datar, dirancang untuk memudahkan pemasangan roda robot atau kopling.
- Dimensi: Ringkas dan standar (seperti yang terlihat pada gambar, sekitar 65mm panjang).
LCD 16x2 adalah jenis layar kristal cair (Liquid Crystal Display) yang mampu menampilkan 16 karakter per baris dalam dua baris. Layar ini sering digunakan dalam proyek-proyek elektronik karena mudah diintegrasikan dengan mikrokontroler seperti Arduino, hemat daya, dan cukup ekonomis.
Spesifikasi LCD 16x2:
1. Ukuran: 16 karakter per baris, dua baris.
2. Interface: Paralel (4-bit atau 8-bit mode).
3. Tegangan Operasional: 5V DC.
4. Arus: Sekitar 2mA tanpa backlight, bisa mencapai 15mA dengan backlight.
5. Karakter: Setiap karakter terdiri dari matriks 5x8 piksel.
6. Backlight: Biasanya tersedia dengan LED backlight untuk visibilitas yang lebih baik.
Pinout LCD 16x2
LCD 16x2 biasanya memiliki 16 pin yang digunakan untuk menghubungkan ke mikrokontroler. Berikut adalah penjelasan masing-masing pin:
1. VSS: Ground (0V)
2. VDD: VCC (5V)
3. V0: Kontras (menggunakan potensiometer untuk menyesuaikan kontras layar)
4. RS (Register Select): Pilih antara register perintah dan data
5. RW (Read/Write): Mengatur mode baca atau tulis
6. E (Enable): Mengaktifkan sinyal untuk membaca/tulis data 7-14. D0-D7: Pin data (digunakan dalam mode 8-bit atau sebagian dalam mode 4-bit)
7. A (Anode): Pin positif untuk backlight LED
8. K (Kathode): Pin negatif untuk backlight LED
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah:
• Lapisan Terpolarisasi 1 (Polarizing Film 1)
• Elektroda Positif (Positive Electrode)
• Lapisan Kristal Cair (Liquid Cristal Layer)
• Elektroda Negatif (Negative Electrode)
• Lapisan Terpolarisasi 2 (Polarizing film 2)
• Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar struktur dasar sebuah LCD:

Struktur LCD
LED (Light Emitting Diode) indikator adalah komponen elektronik yang memancarkan cahaya saat dialiri arus listrik dan digunakan sebagai penanda kondisi suatu sistem. LED hanya menyala jika diberi tegangan dengan polaritas yang benar (forward bias).
Fungsi Umum
-
Menunjukkan status ON/OFF perangkat
-
Menandai kondisi normal atau error
-
Sebagai indikator proses: misalnya "sedang berjalan", "selesai", atau "terdeteksi"
-
Penunjuk level (baterai, sinyal, suhu)
Rangkaian Dasar
Sebuah LED harus dipasang dengan resistor pembatas arus (biasanya 220–1kΩ) untuk mencegah kerusakan akibat arus berlebih.
LED 5 Watt (5W) adalah jenis dioda pemancar cahaya yang memiliki daya relatif tinggi dibandingkan LED biasa (misalnya LED 5mm 0.05W). Dengan daya 5 watt, LED ini mampu menghasilkan cahaya yang terang dan digunakan dalam aplikasi yang membutuhkan pencahayaan kuat seperti lampu sorot (spotlight), senter, lampu motor/mobil, atau sistem candling untuk pengecekan telur.
LED 5W bekerja pada tegangan tertentu (umumnya 3V–3.5V) dengan arus sekitar 1.5A–2A. Karena arusnya besar, penggunaan resistor biasa tidak cukup, dan biasanya memerlukan driver LED khusus atau rangkaian arus konstan agar bekerja stabil dan tidak cepat rusak. Selain itu, LED ini menghasilkan panas cukup tinggi, sehingga diperlukan pendingin (heatsink) untuk menjaga suhu kerja tetap aman dan memperpanjang usia pakai.
Dalam konteks sistem sortir telur otomatis, LED 5W sangat cocok digunakan untuk proses candling karena cahayanya cukup kuat untuk menembus cangkang telur dan memungkinkan sensor (seperti LDR atau photodiode) mendeteksi intensitas cahaya dengan akurat. Penggunaan LED jenis ini membantu meningkatkan keandalan dalam klasifikasi telur bagus dan telur busuk secara visual.
Secara keseluruhan, LED 5W menawarkan kombinasi efisiensi, intensitas cahaya tinggi, dan ukuran ringkas, namun perlu didukung dengan sistem kelistrikan dan pendinginan yang sesuai agar dapat bekerja secara optimal dan tahan lama.
Jumper adalah suatu istilah kabel yang ber-diameter kecil yang di dalam dunia elektronika digunakan untuk menghubungkan dua titik atau lebih dan dapat juga untuk menghubungkan 2 komponen elektronika. Jenis-jenis jumper:
1. Male-male
Jenis kabel yang digunakan untuk koneksi male to male pada kedua ujung kabelnya.
2. Male-female
Jenis kabel yang digunakan untuk koneksi male-female dengan salah satu ujung kabel dikoneksikan male dan satu ujungnya lagi dengan koneksi female.
3. Female-female
Jenis kabel yang digunakan untuk koneksi female-female pada kedua ujung kabelnya.
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.
Spesifikasi dari Relay
1. Trigger Voltage (Voltage across coil) : 5V DC
2. Trigger Current (Nominal current) : 70mA
3. Maximum AC load current: 10A @ 250/125V AC
4. Maximum DC load current: 10A @ 30/28V DC
5. Compact 5-pin configuration with plastic moulding
6. Operating time: 10msec Release time: 5msec
7. Maximum switching: 300 operating/minute (mechanically)
Modul Driver Motor L298N adalah salah satu modul driver motor yang paling umum dan banyak digunakan dalam proyek-proyek elektronika dan robotika, terutama untuk mengendalikan motor DC dan motor stepper. Modul ini dibangun di sekitar chip IC (Integrated Circuit) L298N yang diproduksi oleh STMicroelectronics.
1. Pengertian dan Fungsi Utama:
- Pengertian: Modul L298N adalah papan sirkuit yang mengintegrasikan chip L298N beserta komponen pendukung seperti dioda pelindung, kapasitor, resistor, dan regulator tegangan. Tujuannya adalah mempermudah penggunaan chip L298N tanpa perlu merangkai banyak komponen kecil.
- Fungsi Utama:
- Antarmuka Daya Tinggi: Menyediakan antarmuka antara mikrokontroler (yang beroperasi pada tegangan dan arus rendah) dan motor (yang membutuhkan tegangan dan arus yang lebih tinggi).
- Kontrol Arah Putaran: Memungkinkan perubahan arah putaran motor DC (maju/mundur).
- Kontrol Kecepatan (PWM): Memungkinkan kontrol kecepatan motor DC dengan menggunakan sinyal PWM (Pulse Width Modulation) dari mikrokontroler.
- Kontrol Motor Stepper: Mampu mengendalikan motor stepper 2-fasa 4-kawat.
2. Chip L298N (Dual H-Bridge Driver):
Inti dari modul ini adalah chip L298N, yang merupakan "Dual H-Bridge Driver".
- H-Bridge: Konfigurasi sirkuit H-Bridge adalah rangkaian elektronik yang memungkinkan tegangan diterapkan ke beban (dalam hal ini, motor) dalam dua arah yang berbeda. Ini sangat penting untuk motor DC karena memungkinkan kita untuk memutar motor ke arah maju atau mundur hanya dengan mengubah polaritas tegangan yang diberikan ke terminal motor.
- Satu H-Bridge terdiri dari empat sakelar (transistor) yang disusun seperti huruf 'H'. Dengan mengaktifkan pasangan sakelar yang berbeda, arah aliran arus melalui motor dapat dibalik.
- Dual: Karena L298N adalah dual H-bridge, itu berarti ia memiliki dua H-bridge terpisah di dalam satu chip. Ini memungkinkan modul L298N untuk mengendalikan:
- Dua motor DC secara independen (masing-masing motor menggunakan satu H-bridge).
- Satu motor stepper (motor stepper 2-fasa membutuhkan dua H-bridge).
3. Pin-Out dan Koneksi Umum:
Modul L298N umumnya memiliki pin-out sebagai berikut (penamaan bisa sedikit bervariasi antar produsen):
-
Terminal Input Daya:
- +12V (atau VS): Input tegangan untuk motor (Motor Supply Voltage). Biasanya antara 5V hingga 35V DC.
- GND: Ground umum.
- +5V (atau VCC): Input tegangan logika untuk chip L298N itu sendiri. Biasanya 5V.
- Catatan: Jika tegangan motor (VS) lebih besar dari sekitar 7V, modul sering memiliki regulator 5V on-board. Dalam kasus ini, pin +5V bisa menjadi output 5V yang bisa digunakan untuk memberi daya pada mikrokontroler (dengan melepas jumper yang relevan). Namun, praktik terbaik adalah memberi daya 5V terpisah untuk mikrokontroler.
-
Terminal Output Motor:
- OUT1, OUT2: Terhubung ke Motor A.
- OUT3, OUT4: Terhubung ke Motor B.
-
Pin Input Kontrol (dari Mikrokontroler):
- ENA (Enable A): Mengaktifkan/menonaktifkan Motor A. Digunakan untuk kontrol kecepatan PWM. Jika di-HIGH, motor aktif. Jika di-LOW, motor nonaktif.
- IN1, IN2: Mengontrol arah putaran Motor A. Kombinasi HIGH/LOW menentukan arah (misalnya, IN1=HIGH, IN2=LOW = maju; IN1=LOW, IN2=HIGH = mundur).
- ENB (Enable B): Mengaktifkan/menonaktifkan Motor B (untuk kontrol kecepatan PWM).
- IN3, IN4: Mengontrol arah putaran Motor B.
5. Flowchart dan Listing Program[Kembali]

6. Rangkaian Simulasi dan Prinsip Kerja[Kembali]
Rangkaian Simulasi:

Prinsip Kerja :
Sistem sortir telur otomatis ini dirancang untuk membantu proses klasifikasi telur berdasarkan kualitas secara efisien dan akurat. Telur yang bergerak melalui konveyor akan terlebih dahulu melewati sensor inframerah (IR), yang berfungsi mendeteksi keberadaan telur di titik pemeriksaan. Ketika sensor IR mendeteksi adanya telur, sistem akan menghentikan konveyor sementara agar proses pemeriksaan dapat dilakukan. Setelah telur berhenti di posisi yang ditentukan, LED high-power yang terpasang di bagian bawah akan menyala dan melakukan proses candling, yaitu menyorot cahaya ke dalam telur. Cahaya ini kemudian ditangkap oleh sensor LDR (Light Dependent Resistor) yang berada di sisi atas atau sejajar dengan telur. Sensor LDR membaca intensitas cahaya yang menembus cangkang telur; jika cahaya yang diterima tinggi (terang), maka telur dikategorikan sebagai telur bagus, sedangkan jika intensitas cahaya rendah (gelap), maka telur dianggap busuk atau tidak layak konsumsi.
Setelah proses candling, sistem melanjutkan dengan pengukuran berat telur menggunakan sensor load cell yang terhubung melalui modul penguat sinyal HX711. Berat ini digunakan untuk mendeteksi telur yang memiliki cacat ringan seperti bobot di bawah standar, yang bisa mengindikasikan telur retak, telur abnormal, atau kualitas menurun. Semua data dari sensor LDR dan load cell kemudian dikirim ke mikrokontroler STM32 sebagai unit pemroses utama. STM32 akan memproses nilai-nilai tersebut berdasarkan logika yang sudah diprogram, kemudian memutuskan arah sortir telur. Jika telur diklasifikasikan sebagai telur bagus, maka servo motor akan bergerak ke posisi yang mengarahkan telur ke tray sebelah kiri. Sebaliknya, jika telur diklasifikasikan sebagai telur rusak atau busuk, servo akan bergerak ke posisi tray sebelah kanan.
Informasi hasil sortir seperti status pendeteksian telur, nilai cahaya yang dibaca, hasil evaluasi kualitas telur (bagus/buruk), serta arah sortir akan ditampilkan secara real-time pada LCD 16x2. Selain itu, terdapat indikator LED yang menyala sesuai dengan hasil sortir. Sistem ini bekerja secara otomatis dan berulang, menunggu telur berikutnya terdeteksi oleh sensor IR untuk melanjutkan siklus sortir berikutnya. Dengan rangkaian ini, proses sortir telur menjadi lebih cepat, konsisten, dan mengurangi ketergantungan pada tenaga kerja manusia.



0 comments:
Posting Komentar